|
LinYark
Hi, there, I'm a Optical Engineering Ph.D. student in HUST, working with Prof. Shaoqun Zeng.
My real name is Fengchen He (何丰郴).
My research interest is to simulate the imaging process of optical lens to correct the downstream focusing task.
Dual-Pixel cameras are currently the focus of my research.
Our team is exploring various possibilities for achieving high-resolution and large-field ophthalmic surgeries.
Passionate about the fields of programming, swimming, electronics, and photography.
Crossed the Yangtze River multiple times.
Email /
Github /
知乎 /
Wechat
|

|
|
News
07/2025: Our paper, "Simulating Dual-Pixel Images From Ray Tracing For Depth Estimation" is accepted by ICCV 2025.
03/2025: I have shared a ray-traced Dual-Pixel simulator detailing how to simulate realistic Dual-Pixel images.
07/2024: I maintain a repository dedicated to awesome Dual-Pixel camera technology.
09/2023: I commenced my doctoral journey at HUST.
03/2022: I work as an Auto-Focus algorithm engineer at Xiaomi.
|
|
Education & Working
09/2023 - Now: Ph.D. in Optical Engineering, HUST, Wuhan, China.
03/2022 - 09/2023: Algorithm Engineer on Auto-Focus, Camera Department, Xiaomi, Shanghai, China.
09/2019 - 03/2022: M.Sc. in Optical Engineering, NJUST, Nanjing, China.
09/2015 - 06/2019: B.Sc. in Optical Engineering, NJUST, Nanjing, China.
|
|
Research & Project
I am conducting simulations of cameras and then applying them to various applications.
Computational Dual-Pixel cameras.
Optical imaging system.
Depth est, deblur, and so on.
|
|
|
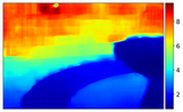
Simulating Dual-Pixel Images From Ray Tracing For Depth Estimation
Fengchen He, Dayang Zhao, Hao Xu, Tingwei Quan, Shaoqun Zeng
ICCV 2025. Paper (Arxiv), Paper (PDF), Github, Website
The ray-traced DP PSF simulator calculates the spatially varying DP PSF.
The pixel-wise DP image rendering module outputs realistic DP simulated images.
The depth estimation model trained with Sdirt generalizes better.
Released a real test set DP119, with an open lens structure and fixed focus.
|
|
|
Auto-Focus Algorithm
Phase, contrast, ToF, and AI autofocus.
The CamX part of autofocus.
Participated in: Xiaomi Mix Fold 2 and 3, Redmi K60 Pro and K70 Pro.
|
|
|
SiamDL: Siamese Dual-Level Fusion Attention Network for RGBT Tracking
Fengchen He, Mingyang Chen, Xiaoyu Chen, Jing Han, Lianfa Bai
Paper, Preprint in 2022s, Github
Cross-domain siamese attention updates templates with rich mode and time context.
Dual-level balance module fuses feature and decision data to balance modal weights.
Our SiamBAN-based method adds MDAM and DLBM, achieving competitive tracking results.
|
|
|
Autonomous Remote Strike System
Intro repo, based on Linux and Qt. Not a paper, just a project in 2021s.
System overview:
UAV equipped with TX2 and Realsense camera communicates via serial protocol.
At high altitude, detection and tracking algorithms lock the target object.
At low altitude, secondary detection extracts detailed target parts for tracking.
Depth maps from Realsense correct positioning, updating flight control.
|
|
|
Automated Welding System
Intro repo, based on Linux and Qt. Not a paper, just a project in 2020s.
System overview:
Parallel cameras extract 2D workpiece features via segmentation and edge detection.
Hand-eye calibration maps 2D features to robot coordinates, forming 3D point clouds.
OCR extracts workpiece names to retrieve matching real point clouds from the database.
Registration aligns real and captured clouds to locate accurate welding positions.
|
|
Miscellanea
Peer review statement:
I am honored to be invited to serve as a peer reviewer in the Dual-Pixel camera field.
I will make every effort to complete the review within two weeks.
|
|